|
NMEA2000 Library
0.1
Library to handle NMEA 2000 Communication written in C++
|
|
NMEA2000 Library
0.1
Library to handle NMEA 2000 Communication written in C++
|
On NMEA2000 NAME (written all capital) means data defined by device information. Since device information will be sent by PGN 60928, NAME is also 8 byte content of than message. NAME can be used to identify devices sending some information. For this reason it is important that NAME is unique for all devices on the bus.
Normally unique number and manufacturer code within device information should be enough to define unique device. Some manufactures does not do that and their devices may require modification for device instance when same devices appears on the bus.
Safest way to fullfill unique NAME requirement is to keep unique number unique. For commercial production that requires some kind of register for manufactured devices.
On library you set device information by using function tNMEA2000::SetDeviceInformation and if necessary with function tNMEA2000::SetDeviceInformationInstances.
NMEA2000 bus can have maximum 252 devices. Each device will get device source address (0-251), which can be predefined on device start, but may be changed by address claiming at any time.
On start device starts address claiming using previously saved source address by sending its NAME to the bus by using message ISO address claim PGN 60928. If there is no other device using same source address, device can start normal operation after 250 ms delay. If there is another device using same address there are two possible cases.
If bus is full of devices, devices with lowest priority will get source address 254 and they can not send anything to bus.
Library takes care of address claiming and required silence delay automatically. To get information possible source address changes, use funtion tNMEA2000::ReadResetAddressChanged().
Instances are used in an NMEA 2000 network to identify multiple similar products connected on the same network.
As an example, take a system with two battery monitors (one for the main battery bank, and another for the hydraulic-thruster bank) and also a Quattro inverter/charger. All three of those devices will send their battery voltage measurements out on the N2K network. For the displays to show these values at the right place, they need to know which voltage belongs to what battery. That is what instances are for.
There are various types of instances: Device instance, Data instance and System instance. Device and System instance is stored in tNMEA2000::tDeviceInformation and so they are also part of NAME. See also tNMEA2000::SetDeviceInformationInstances.
The device instance is sent in PGN 60928, ISO Address Claim, as a combined field of Device Instance Lower (ISO ECU Instance) and Device Instance Upper (ISO Function Instance). The Device instance is e.g., used by Victron chargers (Skylla-i/-IP44, VE.Can MPPTs) to configure them in the same group and synchronize them.
These instances belong to data on the bus (e.g., Battery Instance, DC Detailed Instance, Switch bank instance, etc.) and are embedded in the different PGN’s. For changing these instances through a complex write, PGN 126208, Complex Request Group Function Code 5, write fields.
The system instance is also sent in PGN 60928, field 8. System instance indicates device occurence in other like redundant or parallel NMEA2000 networks. For small and simple vessels this is always 0.
The sequence identifier field is used to tie different PGNs data together to same sampling or calculation time. In other words same SID in different PGNs sent by same device defines that values on PGN:s has been sampled or calculated at same time. Devices reading those messages can use in calculations PGNs data provided with same SID and get more accurate results.
For example, the GPS200 will transmit identical SIDs for 126992 (System Time), 128259 (Speed), 129026 (COG and SOG, Rapid Update), 129029 (GNSS Position Data), 129539 (GNSS DOPs), and 129540 (GNSS Satellites in View) to indicate that the readings are linked together (i.e., the data from each PGN was taken at the same time although they are reported at slightly different times).
E.g., with temperature data I do not see any use for SID. Temperature changes are normally anyway slow and 1.5-2 s difference on sampling does not have meaningfull effect. I would also think that there is no device using SID for temperature, pressure and humidity data.
On sending in most cases you can use just 0xff for SID. On receiving you can normally just forget it.
If you like to use SID, you have to increase value synchronized with sampling and sending. SID value has to be on range 0-252. 255 (0xff) means data not available and 253-254 are reserved. So use it e.g., with code
Sending task:
The Manufacturer Code is part of the NAME (see tNMEA2000::tDeviceInformation). Manufacturer code is mandatory for each NMEA2000 device and it has to be requested from NMEA organization.
Note that NMEA2000 devices does not have way to request manufacturer name. Manufacturer code is link to hardcoded name. So if you have old MFD and sersor from new manufacturer, sensor will be listed with name "unknown manufacturer".
Some manufacturers hardcodes which manufacturer sensors they accept. So in case e.g., MFD document claims to support e.g., PGN 130316, but sensor data will not be shown or not shown properly, check your MFD manufacturer that your sensor manufacturer is listed in their database. As opposite if you make device for your own vessel only, you can setup your device to use accepted manufacturer code.
List of registered manufacturer codes
I have advertised library to be certification ready. There are some functionalities left for developer, since there is no common way do that. Good example is saving possibly changed source address or device/system instances. It is developer responsibility to choose method for saving. It can be e.g., EEPROM, file, flash. To fullfill all certification requirements you have to add some functionality.
For commercial certified devices you need also (prices at 2024 are for members):
So total costs for certified device for new member is about 4000 $.
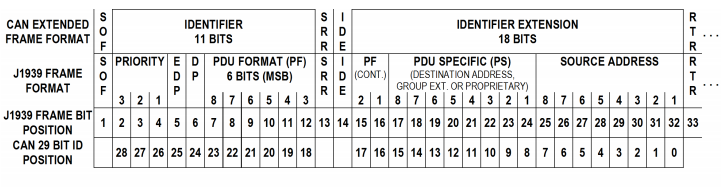
The SAE J1939 protocol requires a specific format for the CAN message’s identifer. The ID can consist of 11 bits, or optionally 29 bits in the extended format. At NMEA2000 only the extended format ist supported.
| Code | Manufacturer name |
|---|---|
| 78 | Fw Murphy |
| 80 | Twin Disc |
| 85 | Kohler Power Systems |
| 88 | Hemisphere |
| 116 | BEP Marine |
| 135 | Airmar |
| 137 | Maretron |
| 140 | Lowrance |
| 144 | Mercury Marine |
| 147 | Nautibus Electronic Gmbh |
| 148 | Blue Water Data |
| 154 | Westerbeke |
| 161 | Offshore Systems UK |
| 163 | Evinrude/Brp Bombardier |
| 165 | CPAC Systems Ab |
| 168 | Xantrex Technology |
| 172 | Yanmar Marine |
| 174 | Ab Volvo/Volvo Penta |
| 176 | Carling Technologies |
| 185 | Beede Electrical |
| 192 | Floscan Instrument Co., Inc. |
| 193 | Nobeltec |
| 198 | Mystic Valley Communications |
| 199 | Actia Corporation |
| 201 | Disenos Y Technologia |
| 211 | Digital Switching Systems |
| 215 | Xintex/Atena |
| 224 | Emmi Network |
| 228 | Zf Marine Electronics |
| 229 | Garmin |
| 233 | Yacht Monitoring Solutions |
| 235 | Sailormade Marine Telemetry |
| 243 | Eride |
| 257 | Honda Motor Company |
| 272 | Groco |
| 273 | Actisense |
| 274 | Amphenol Ltw Technology |
| 275 | Navico |
| 283 | Hamilton Jet |
| 285 | Sea Recovery |
| 286 | Coelmo Srl Italy |
| 295 | BEP Marine |
| 299 | Garmin |
| 304 | Trigentic/EmpirBus |
| 305 | Novatel |
| 306 | Sleipner Motor As |
| 307 | Mbw Technologies |
| 315 | ICOM |
| 328 | Qwerty |
| 329 | Dief |
| 341 | Böning Automationstechnologie GmbH |
| 345 | Korea Maritime University |
| 351 | Thrane And Thrane |
| 355 | Mastervolt |
| 356 | Fischer Panda Generators |
| 358 | Victron Energy |
| 370 | Rolls Royce Marine |
| 373 | Electronic Design |
| 374 | Northern Lights |
| 378 | Glendinning |
| 381 | B&G |
| 384 | Rose Point Navigation Systems |
| 385 | Johnson Outdoors Marine Electronics |
| 394 | Capi 2 |
| 396 | Beyond Measure |
| 400 | Livorsi Marine |
| 404 | ComNav |
| 419 | Fusion Electronics |
| 421 | Standard Horizon |
| 422 | True Heading |
| 426 | Egersund Marine Electronics As |
| 427 | Em-Trak Marine Electronics Ltd |
| 431 | Tohatsu Co Jp |
| 437 | Digital Yacht |
| 438 | Comar Systems Limited |
| 440 | Cummins |
| 443 | VDO |
| 451 | Parker Hannifin |
| 459 | Alltek Marine Electronics Corp |
| 460 | San Giorgio S.E.I.N. |
| 466 | Veethree Electronics |
| 467 | Humminbird Marine Electronics |
| 470 | SI-TEX Marine Electronics |
| 471 | Sea Cross Marine Ab |
| 475 | GME/Standard Communications |
| 476 | Humminbird Marine Electronics |
| 478 | Ocean Sat Bv |
| 481 | Chetco Digitial Instruments |
| 493 | Watcheye |
| 499 | Lcj Capteurs |
| 502 | Attwood Marine |
| 503 | Naviop S.R.L. |
| 504 | Vesper Marine |
| 510 | Marinesoft Co. LTD |
| 517 | NoLand Engineering |
| 518 | Transas USA |
| 529 | National Instruments Korea |
| 532 | Onwa Marine |
| 540 | Webasto |
| 571 | Marinecraft Co. |
| 573 | McMurdo Group |
| 578 | Advansea |
| 579 | KVH |
| 580 | San Jose Technology |
| 583 | Yacht Control |
| 586 | Suzuki Motor Corporation |
| 591 | USCG |
| 595 | ShipModul |
| 600 | Aquatic AV |
| 605 | Aventics GmbH |
| 606 | Intellian |
| 612 | SamwonIT |
| 614 | Arlt Tecnologies |
| 637 | Bavaria Yacts |
| 641 | Diverse Yacht Services |
| 644 | KUS Manufacturer |
| 645 | Garmin |
| 658 | Shenzhen Jiuzhou Himunication |
| 688 | Rockford Corporation |
| 704 | JL Audio |
| 715 | Autonnic |
| 717 | Yacht Devices |
| 734 | REAP Systems |
| 735 | Au Electronics Group |
| 739 | LxNav |
| 740 | JL Audio |
| 743 | DaeMyung Elevator |
| 744 | Woosung |
| 773 | Clarion US |
| 776 | HMI Systems |
| 777 | Ocean Signal |
| 778 | Seekeeper |
| 781 | Poly Planar |
| 785 | Fischer Panda DE |
| 795 | Broyda Industries |
| 796 | Canadian Automotive |
| 797 | Tides Marine |
| 798 | Lumishore |
| 799 | Still Water Designs and Audto |
| 802 | SPBI SA Ets BJTechnologie |
| 803 | Gill Sensors |
| 811 | Blue Water Desalination |
| 815 | Flir Systems |
| 824 | Undheim Systems |
| 838 | TeamSurv |
| 844 | Fell Marine |
| 847 | Oceanvolt |
| 862 | Prospec |
| 868 | Data Panel Corp |
| 890 | L3 Technologies Maritime Systems |
| 894 | Rhodan Marine Systems |
| 896 | Nexfour Solutions |
| 905 | ASA Electronics |
| 909 | Marines Co (South Korea) |
| 911 | Nautic-On, A Brunswick Company |
| 930 | Ecotronix Corp |
| 944 | Zonisa Marine |
| 951 | Exor International S.p.A. |
| 962 | Timbolier Industries |
| 968 | Cox Powertrain |
| 969 | Blue Sea |
| 981 | Kobelt |
| 1008 | Lintest SmartBoat |
| 1011 | Soundmax |
| 1020 | Onyx Marine Automation s.r.l |
| 1021 | Entratech |
| 1022 | ITC Inc. |
| 1023 | PEAK-System Technik GmbH |
| 1029 | The Marine Guardian LLC |
| 1034 | Siren Marine |
| 1047 | Sonic Corporation |
| 1051 | ProNav |
| 1053 | Stillwater Designs / Kicker |
| 1059 | Boatrax |
| 1062 | ComNav |
| 1065 | CALYPSO Instruments |
| 1066 | Spot Zero Water |
| 1070 | Quick-teck Electronics Ltd |
| 1075 | Uniden America |
| 1083 | Nauticoncept |
| 1084 | Shadow-Caster LED lighting LLC |
| 1088 | E-T-A Circuit Breakers |
| 1092 | Scheiber |
| 1095 | Wetsounds |
| 1140 | Across Ocean Systems Ltd. |
| 1305 | Dragonfly Energy |
| 1850 | Teleflex |
| 1851 | Raymarine |
| 1852 | Navionics |
| 1853 | Japan Radio Co |
| 1854 | Northstar Technologies |
| 1855 | Furuno |
| 1856 | Trimble |
| 1857 | Simrad - Navico |
| 1858 | Litton |
| 1859 | Kvasar Ab |
| 1860 | Mmp |
| 1861 | Vector Cantech |
| 1862 | Sanshin Industries/Yamaha Marine |
| 1863 | Faria Instruments |